
For most robot joints, cross roller bearings are “better” when you need maximum stiffness, moment-load capacity, and repeatable positioning in a compact envelope; thin section bearings are “better” when ultra-low weight, minimal radial space, and cost-sensitive designs dominate. The right choice depends on torque loads, required precision, contamination risk, and target lifecycle.
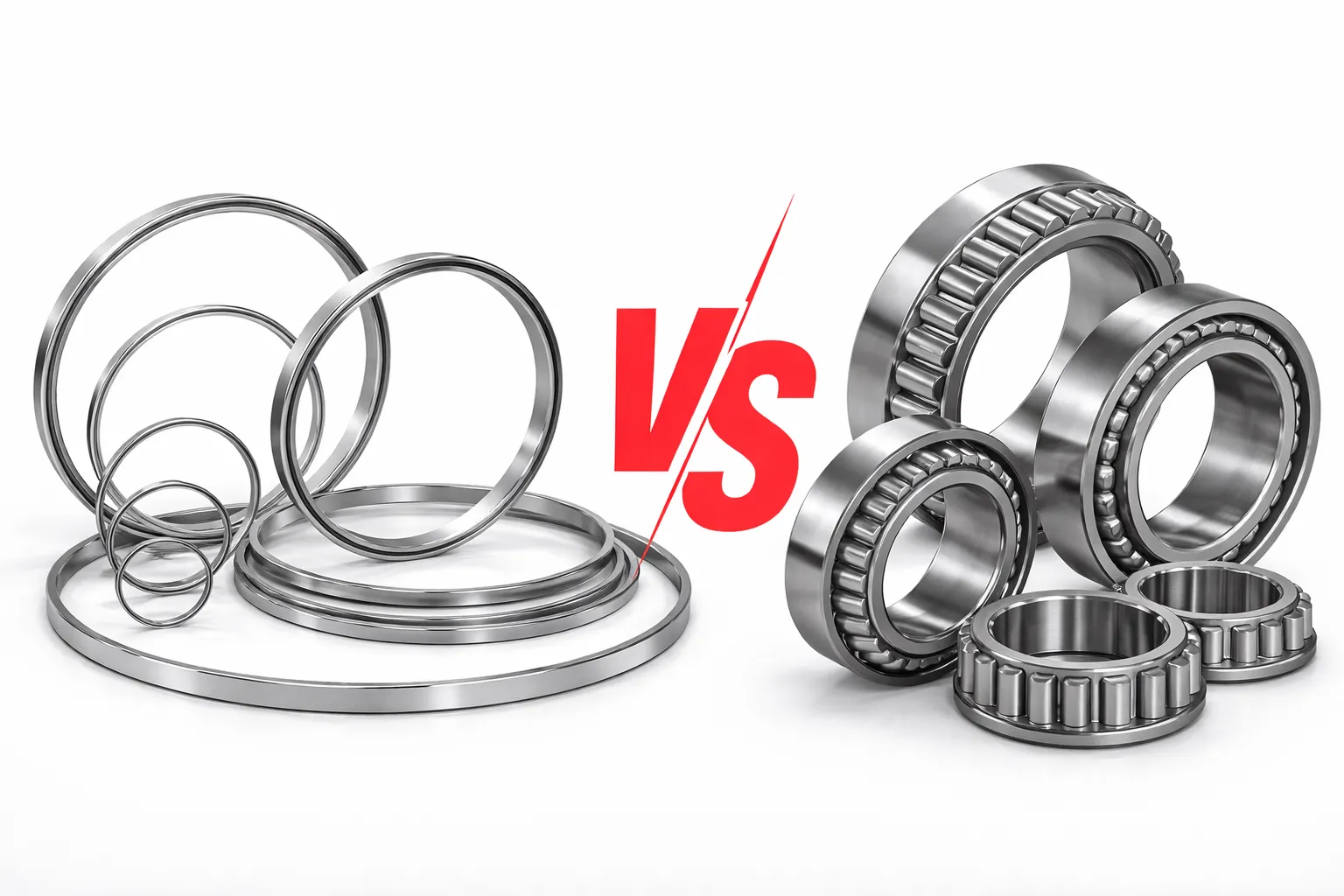
Key selection differences for robot joints (stiffness, accuracy, packaging, cost)
Cross roller bearings use alternating cylindrical rollers in a single raceway to carry radial, axial, and moment loads simultaneously with high stiffness. Thin section bearings (ball, four-point contact, or crossed roller thin types) prioritize low radial cross-section and reduced weight, but typically trade away stiffness and moment rigidity unless specially configured.
| Decision factor (robot joint) | Cross roller bearing | Thin section bearing |
|---|---|---|
| Moment stiffness (tilting rigidity) | Excellent (core advantage) | Moderate (higher only with four-point / special preload) |
| Positioning repeatability | Excellent due to low elastic deflection | Good, but more sensitive to preload and housing distortion |
| Load capacity in compact axial height | High | Medium (varies by type; ball types lower than rollers) |
| Weight & inertia | Moderate | Excellent (very low mass) |
| Packaging constraint | Axially compact, moderate radial | Radially minimal, often best for tight OD/ID envelopes |
| Assembly sensitivity (housing flatness, distortion) | Moderate | High (thin rings deform easily) |
| Typical use in robots | Harmonic/strain wave output, RV reducers, rotary tables, base joints | Lightweight arms, gimbals, compact wrists, space-limited joints |
| Total cost of ownership (TCO) | Often lower in high-load precision joints | Often lower in light-duty, high-volume joints |
Haron Bearing Pro Tip: In our lab tests at Haron Bearing, we found that “bearing choice” failures in robots are frequently housing and preload issues, not catalog load ratings. We typically model joint moment loads and housing deflection first; if predicted tilt/deflection is the limiting factor, we default to cross rollers (or preloaded four-point thin sections only when mass/radial space is the dominant constraint).
What are the advantages of cross roller bearings?
Cross roller bearings deliver very high stiffness and can support radial, axial, and moment loads in one compact unit, which improves robot joint repeatability under torque. They also reduce the need for paired bearings and simplify stack-ups. For precision robots, their low elastic deflection often translates directly into better accuracy and longer service life.
Where cross rollers win in robots
- High moment-load joints (bases, shoulders): fewer microradians of tilt under load
- Simpler bearing arrangement: one bearing can replace duplex pairs
- Better control feel: lower compliance improves servo tuning and settling time
Haron Bearing Pro Tip: Our technicians often see robot builders underestimate overturning moment at the flange. We ask for worst-case reach, payload, acceleration, and emergency stop torque; when those are included, cross rollers frequently eliminate “mystery” vibration and end-effector drift.
What is the most efficient bearing design?
The “most efficient” bearing is the one that meets stiffness and life targets with the lowest friction, heat, and integration cost. For pure radial loads at high speed, deep-groove ball bearings are typically most efficient. For combined loads and high moment stiffness in robots, cross roller bearings can be more system-efficient because they avoid extra bearings and reduce compliance.

Efficiency = friction + stiffness + integration losses
| Application goal | Typically most efficient choice | Why |
|---|---|---|
| Highest speed, low torque | Deep-groove ball bearing | Low rolling friction, simple lubrication |
| High moment stiffness, compact joint | Cross roller bearing | Single bearing handles combined loads |
| Ultra-light, minimal radial space | Thin section ball bearing | Low mass and thin rings |
Haron Bearing Pro Tip: Our technicians often see teams optimize for bearing friction alone and then “pay it back” in control instability. We evaluate efficiency at the joint level: motor current, settling time, and thermal rise after integration—not just bearing torque in isolation.
What bearings do most skaters use?
Most skates use standard deep-groove ball bearings, commonly in 608 or 627 sizes, because they’re inexpensive, efficient at high speed, and easy to seal. They’re typically rated by ABEC (with caveats) and paired with shields or seals to manage dirt and moisture. For robotics, these are rarely used for high-moment joints due to limited stiffness.
Why 608-style bearings dominate skating
- Standardization (availability worldwide)
- High-speed suitability (low torque at RPM)
- Low cost and easy replacement
Haron Bearing Pro Tip: Our technicians often see ABEC misunderstood as a “speed rating.” We remind customers that ABEC mainly relates to dimensional tolerances; lubrication, seals, cleanliness, and alignment typically dominate real-world speed and noise for skates (and for small robot wheels, too).
What is the 2 1 rule for linear bearings?
The “2:1 rule” for linear bearings generally means spacing two bearing blocks as far apart as practical—often about twice the carriage length or at least enough to resist pitching moments—while keeping one rail as the reference and the other as a follower. This reduces binding risk and improves moment stiffness in linear robot axes.
Practical checklist for applying the 2:1 rule
- Maximize bearing spacing to reduce pitch/roll under load
- Constrain/float strategy: one rail locates, the other accommodates misalignment
- Align to load path: keep payload CG between rails when possible
- Verify with moment calculations (Mx, My, Mz) and manufacturer load ratings
Haron Bearing Pro Tip: Our technicians often see premature linear bearing wear caused by over-constraint. We recommend a clear datum scheme (one “master” rail) and measured mounting flatness; then validate with a simple moment/deflection model before cutting metal.
What’s your wholesale price difference between cross roller bearings and thin section bearings for robot joints at 1k/5k/10k units?
Wholesale pricing depends heavily on size, accuracy class, preload, seals, and material/coating; as a rule, cross roller bearings are typically higher unit cost than thin section ball bearings, but may reduce total BOM by replacing duplex pairs. For 1k/5k/10k quantities, we quote by joint load case and target runout/stiffness to avoid overspec.

Typical cost drivers we use to quote (what to send for a fast RFQ)
- Bearing type (cross roller vs thin section ball / four-point)
- ID/OD/width + mounting geometry
- Accuracy class (runout), preload, and torque target
- Sealing (contact/non-contact), grease spec, corrosion protection
- Life target (duty cycle, contamination exposure)
Haron Bearing Pro Tip: Our technicians often see buyers compare unit prices without matching preload and accuracy. We quote apples-to-apples by specifying runout + preload + friction torque window; otherwise a “cheaper” bearing often creates higher scrap rates and longer tuning time on the robot line.
For robotic arms, which option offers lower total cost of ownership (precision, stiffness, lifecycle) and what lead times/MOQs apply for each?
For high-precision articulated joints (shoulder/base/wrist with high moment loads), cross roller bearings often deliver lower total cost of ownership because they maintain stiffness and repeatability longer and simplify the bearing stack. For lightweight, low-moment joints, thin section bearings can win on weight and unit cost. Lead times/MOQs depend on customization, accuracy, and sealing requirements.
TCO comparison framework (what we evaluate)
| TCO element | Cross roller | Thin section |
|---|---|---|
| Precision retention (wear + deflection) | Strong | Medium (sensitive to distortion/preload) |
| Joint stiffness (control performance) | Strong | Medium to good (design-dependent) |
| Integration complexity | Often lower (single bearing) | Can be lower for tight radial packaging, but higher sensitivity |
| Lifecycle in contamination | Good with proper seals/grease | Good, but thin rings can be less forgiving |
| Best-fit robot joints | High-torque, high-moment axes | Lightweight/compact axes, gimbals |
Typical commercial terms (guideline; confirm by RFQ):
- Cross roller bearings: MOQ often higher for custom preload/seals; lead time typically longer for high-accuracy, matched sets.
- Thin section bearings: MOQ can be lower for standard sizes; lead time often shorter unless special materials/seals are required.
Haron Bearing Pro Tip: Our technicians often see the lowest TCO achieved by matching bearing stiffness to the reducer and housing—then selecting seals/grease for the real environment (coolant mist, dust, washdown). We encourage a quick joint load + stiffness target review before committing to thin rings, because housing distortion can erase the expected precision benefits.
Summary: In cross roller bearing vs thin section bearing decisions for robots, cross rollers usually win on stiffness and precision retention, while thin sections win on weight and radial packaging—choose based on joint moments, housing rigidity, and lifecycle environment.